起升原理:操作者站在手链轮的一方,向下拉动手链条使手链轮作顺时针方向转动,于是,手链轮经各传动齿轮的传动,使起重链轮转动,由起重链条带动货物起升。在制动器的作用下,保证货物可以停留在空中任意位置而不致自行下坠。
下降原理:向下拉动另一根手链条,使手链轮作逆时针方向转动,这时,棘爪放开棘轮,在下吊钩等自重的作用下,即可平稳下降。在手链条停止拉动时,制动器立即恢复制动功能,使货物可在任意位置停住。
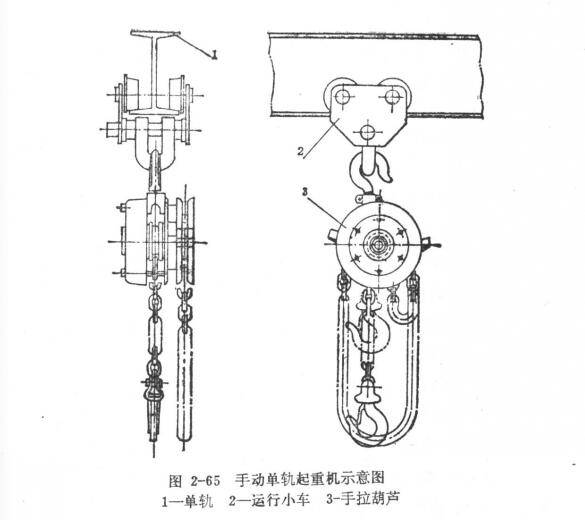
手拉葫芦可以直接吊挂在固定物体上而作为定点吊挂的固定式使用,也可以配备运行小车在单轨上手动滑行而作为手动单轨起重机使用。
根据我国机械工业部标准JB5601-83《HS手拉葫芦》的规定,一般用途的带有二级正齿轮传动机构的手拉葫芦,起重量等级有0.5吨、1吨、1.5吨、2吨、3吨、5吨、7.5吨、10吨、15吨、20吨等多种规格可选择。
手拉葫芦是一种使用简易、携带方便的手动起重工具,尤其对于无电源场所或露天作业用于起吊货物及装卸车辆,更为便利。
构造:由上吊钩、工作机构、下吊钩、起重链条、手链条等组成。上吊钩吊挂在支承物体上,上吊钩的下方有壳体,内装工作机构。工作机构包括起重链轮、手链轮、棘轮摩擦片式单相制动器、传动齿轮与轴等。由起重链轮传动并与下吊钩相连接的是起重链条。传递人力拽引的动力的是手链条。 下吊钩用于吊挂货物。
欢迎技术类投稿,经采纳将发布至“设备技术”推广宣传,扩大企业知名度、影响力。投稿内容不得有版权纠纷的内容或图片。
投稿邮箱:加载中,微信公众号:起重商桥,请将投稿内容发送至邮箱/公众号即可。

微信客服
